

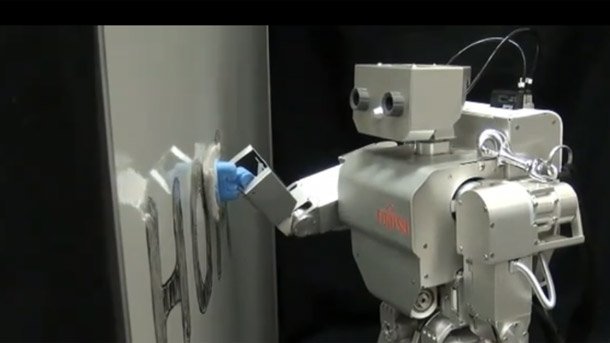
Друго, което направихме в сътрудничество с проф. Драгомир Ненчев, който работи в Токио, е един робот, който научихме да изтрива вертикална повърхност, например дъска или прозорец. В този случай използвахме първия тип методи, които са чрез имитация, т.е. човек демонстрира движението, което роботът трябва да научи. След няколко демонстрации роботът научава движението и може да възпроизвежда тази задача при различни условия, например повърхност под различен ъгъл, на различно положение и да покрива повърхност с различна площ.”
Какви са предимствата и приложението на методите, над които работи младият български учен:
„Основното предимство е, че един ден, когато роботите станат достатъчно достъпни и повече домакинства могат да си купят такъв робот за вкъщи, то собствениците на робота ще могат да го обучават на нови задачи, т.е. на неща, които създателите на робота никога не са предвидили предварително – обяснява той. – Роботите ще имат доста голяма гъвкавост в начините, по които ще могат да се използват. И това е нашата цел. Но докато се стигне до този момент, ще минат още много години, защото все още роботите са много скъпи. Дори най-елементарните части за един робот, например двигателите или трансмисията все още са на много висока цена. Все още малката бройка роботи, които се произвеждат, е друг фактор за високата им цена. Така че основното, което трябва да се направи, за да се популяризират роботите в ежедневието, е да се намали цената им и второ, да се увеличи тяхната гъвкавост като се направят самообучаващи се, за да могат хората да ги научават да изпълняват различни задачи.”
Снимки: личен архив

Изработването на плетени изделия е традиционен занаят, който заслужава възраждане и нов живот, вярва Александрина Пандурска, позната с многобройните си инициативи за популяризиране на културни и исторически места в района на Благоевград. По нейна идея..

"Ужасното нападение в Магдебург в навечерието на Коледа е възмутително. Подобни престъпления и прояви на насилие са напълно недопустими" - това написа президентът Румен Радев в социалната мрежа “X“ по повод терористичната атака над коледния базар в..

Най-важното е да се състави правителство, каза пред БНР председателят на парламента доц. Наталия Киселова. Ако има разговори за правителство, ще има и за другите органи, с изключение на Висшия съдебен съвет, защото мнозинството, което трябва да го..








Роднини от двете страни на границата чакат да се възстанови вековен маршрут, който свърза Родопите с Беломорието. На 1-ви януари 2025 г., след падането на..
Хората от централата на БСП на ул. "Позитано" 20 в София са били евакуирани заради сигнал за бомба в събота преди обяд. Заплахата е получена по имейл,..
"Ужасното нападение в Магдебург в навечерието на Коледа е възмутително. Подобни престъпления и прояви на насилие са напълно недопустими" - това написа..
